Sistem EPS yang akan dibangun terdiri atas :
1. Sensor Arus untuk solar cell :
Sensor arus solar cell berguna untuk mengetahui kondisi solar cell yang terpasang pada badan satellite. Alasan digunakannya sensor ini adalah mengetahui kualitas solar cell yang terpasang yakni apakah masih dalam keadaan prima atau menuju pada kerusakan permanen mengingat peralatan satellite yang telah terpasang tidak bisa diperbaiki setelah diluncurkan.
2. Sensor Voltage
Sensor tegangan atau Voltage sensor berguna untuk memastikan hasil konversi tegangan dari catu daya (soalar cell) sebesar yang telah dirancang. Bila hasil konversi tidak sesuai maka suplai energy ke sistem lainnya akan merusak kinerja sistem lain tersebut atau lebih parahnya akan merusak batre.
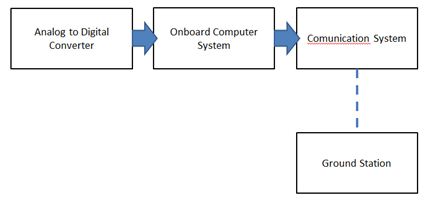
3. ADC (analog to digital converter)
Alat ini berfungsi merubah sinyal sensing analog menjadi sinyal digital. Sinyal yang dirubah menjadi digital mempunyai ketahanan pada proses transmisi data dari sensing elemen kepada oprator yang mengawasi di bumi.
4. 3.3 V Converter dan Input filter
Modul ini merupakan modul elektronik yang berfungsi merubah tegangan input dari solar cell dan sistem batre menjadi tegangan sebesar 3.3 volt. Tujuan dibuat modul ini adalah untuk mensuplai unit sistem ITB-SAT yang memerlukan 3.3 Volt untuk berfungsi secara maksimal.
5. 5 V Converter dan Input filter
Modul ini merupakan modul elektronik yang berfungsi merubah tegangan input dari solar cell dan sistem batre menjadi tegangan sebesar 5 Volt. Tujuan dibuat modul iniadalah untuk mensuplai unit sistem ITB-SAT yang memerlukan 5 Volt untuk berfungsi secara maksimal.
6. 7.2 V Converter dan Input filter
Modul ini merupakan modul elektronik yang berfungsi merubah tegangan input dari solar cell dan sistem batre menjadi tegangan sebesar 7.2 volt. Tujuan dibuat modul ini adalah untuk mensuplai unit sistem ITB-SAT yang memerlukan 7.2 Volt untuk berfungsi secara maksimal.
7. 3.3 V Protection
Modul ini berfungsi sebagai proteksi dari subsistem yang memiliki kebutuhan voltage sebesar 3.3 V agar tidak terjadi over voltage yang dihasilkan converter. Over voltage terjadi karena hasil pembangkitan energy yang dilakukan solar cell tidak uniform dikarenakan bentuk dan penempatan solar cell di badan satellite.
8. Shunt Regulator
Shunt regulator merupakan modul yang berfungsi untuk menjadi pengaman rangkaian EPS agar tidak terjadi overcharge secara keseluruhan. Shunt regulator merubah energy listrik yang berlebihan ketika batre terisi penuh dan keperluan energy rendah menjadi panas sehingga rangkaian EPS akan aman dari fail (kegagalan).
Cara Kerja Sistem
Solar cell dan sensor kondisi solar cell

Rangkaian solar cell memiliki modul pengaman agar arus tidak berbalik ke solar cell bila voltage batre lebih tinggi dari voltage yang dihasilkan dari solar cell. Pengaman ini menggunakan Dioda agar arus tidak berbalik menuju solar cell. Selain itu ada rangkaian sensing kondisi solar cell yang menghasilkan data arus dan voltage dari solar cell yang dihasilkan dan menjadi representasi kesehatan solar cell. Data yang dihasilkan modul sensing ini selanjutnya dikirimkan ke ADC.
Voltage Converter

Voltage converter bekerja ketika energi yang dihasilkan solar cell mulai masuk ke rangkaian utama. Sebelum digunakan, energy yang dihasilkan dikonversi besaran voltage-nya menjadi voltage yang diperlukan oleh unit sistem lainnya untuk beroprasi secara baik. Converter voltage dibagi menjadi beberapa converter sesuai dengan kebutuhan unit sistem untuk beroprasi secara baik.
Shunt Regulator (dissipation system)

Shunt regulator berfungsi setelah ada kelebihan daya yang dihasilkan oleh solar cell. Pada saat daya berlebih IC regulator shunt akan mengalirkan daya ke transistor agar menghasilkan heat untuk mengurangi daya listrik yang dihasilkan.
Analog to digital converter

ADC berfungsi pada saat input data analog dihasilkan. Input analog ini dihasilkan dari sistem sensing pada modul EPS secara umum. Input analog ini selanjutnya diubah menjadi data digital oleh ADC ini. Seacara umum input analog akan diambil sample pada saat tertentu untuk diubah menjadi data digital
Sensing Element

by: Ridwan Aldilah